Accelerated Gradient Descent
本章围绕 加速梯度下降(Accelerated Gradient Descent)展开。我们从梯度下降在病态问题上的 “锯齿形” 现象出发,引入两类典型的加速策略:
- 动量法:Polyak 的 heavy-ball(重球)动量、Nesterov 的加速梯度(NAG)。
- 多步历史外推:Anderson acceleration。
在理论部分,我们给出 Nesterov 方法在 一般凸 与 强凸 场景下的严格收敛证明,并说明其达到一阶方法的 最优复杂度(lower bound)。
1 问题设定与基本不等式¶
考虑无约束优化问题:
其中 \(f\) 可微。
定义 1.1(\(L\)-光滑 / \(L\)-smooth)
\(f\) 是 \(L\)-光滑的,若对任意 \(x,y\in\mathbb{R}^d\) 有
等价地(下降引理),对任意 \(x,y\) 有
定义 1.2(\(\mu\)-强凸 / \(\mu\)-strongly convex)
\(f\) 是 \(\mu\)-强凸的,若存在 \(\mu>0\) 使得对任意 \(x,y\) 有
1.1 梯度下降(基线)¶
梯度下降(GD)更新为
对于 \(L\)-光滑且凸的 \(f\),典型选择 \(\gamma\le 1/L\) 可保证稳定下降;但在 条件数 \(\kappa:=L/\mu\) 很大(等高线极扁)的情形,GD 容易出现明显的 “zig-zag”,收敛非常慢。
2 动量的直觉:缓解 “zig-zag”¶
动量方法的核心思想是:在负梯度方向下降之外,再加入一个与历史位移相关的外推项,从而让迭代轨迹更 “顺滑”。
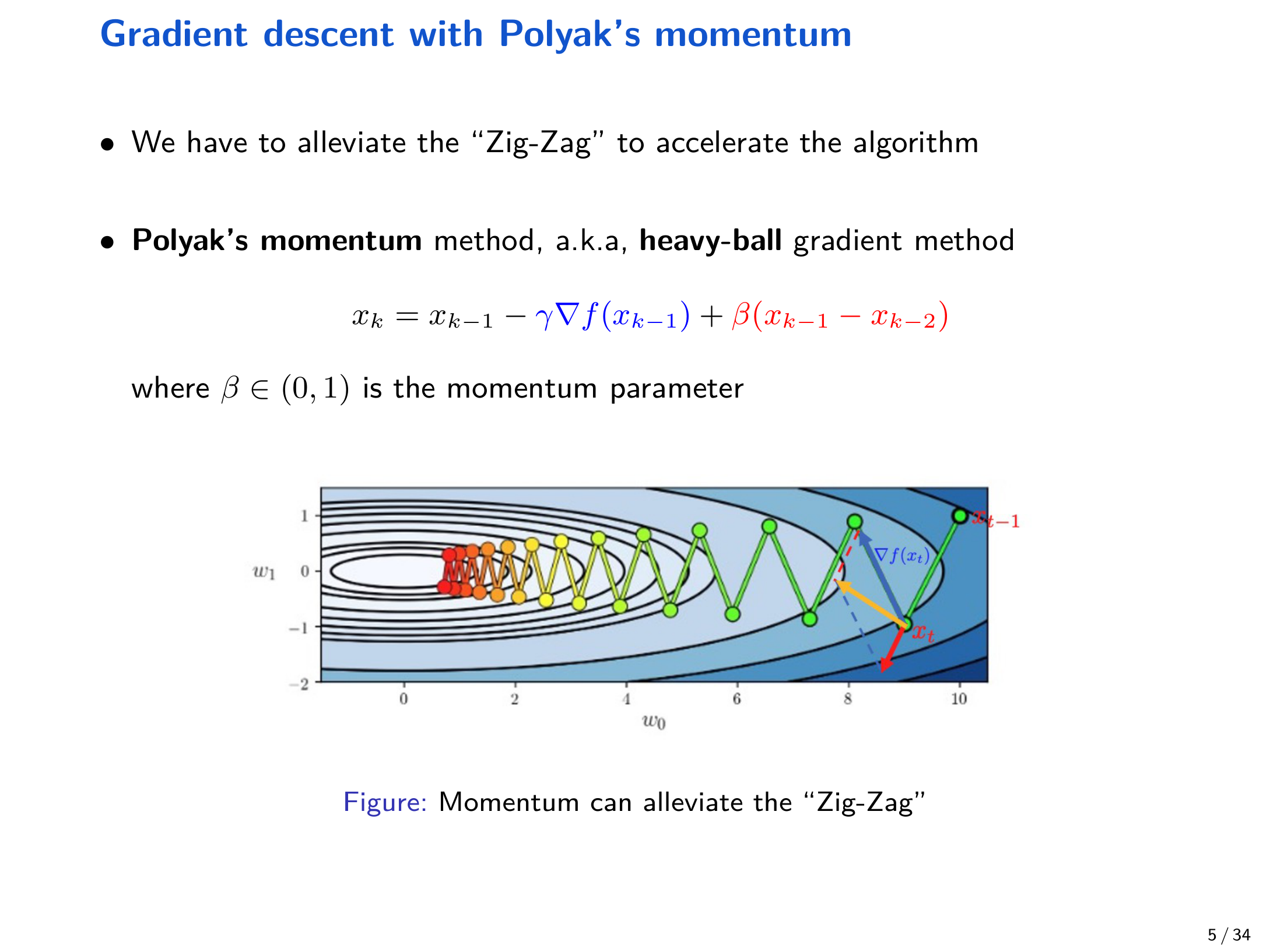
3 Polyak 的 Heavy-Ball 动量(重球法)¶
3.1 算法¶
Heavy-ball(Polyak momentum)迭代为
它可以理解为:在 “当前位置” 的梯度下降基础上,叠加一段沿着历史速度 \((x_k-x_{k-1})\) 的惯性推进。
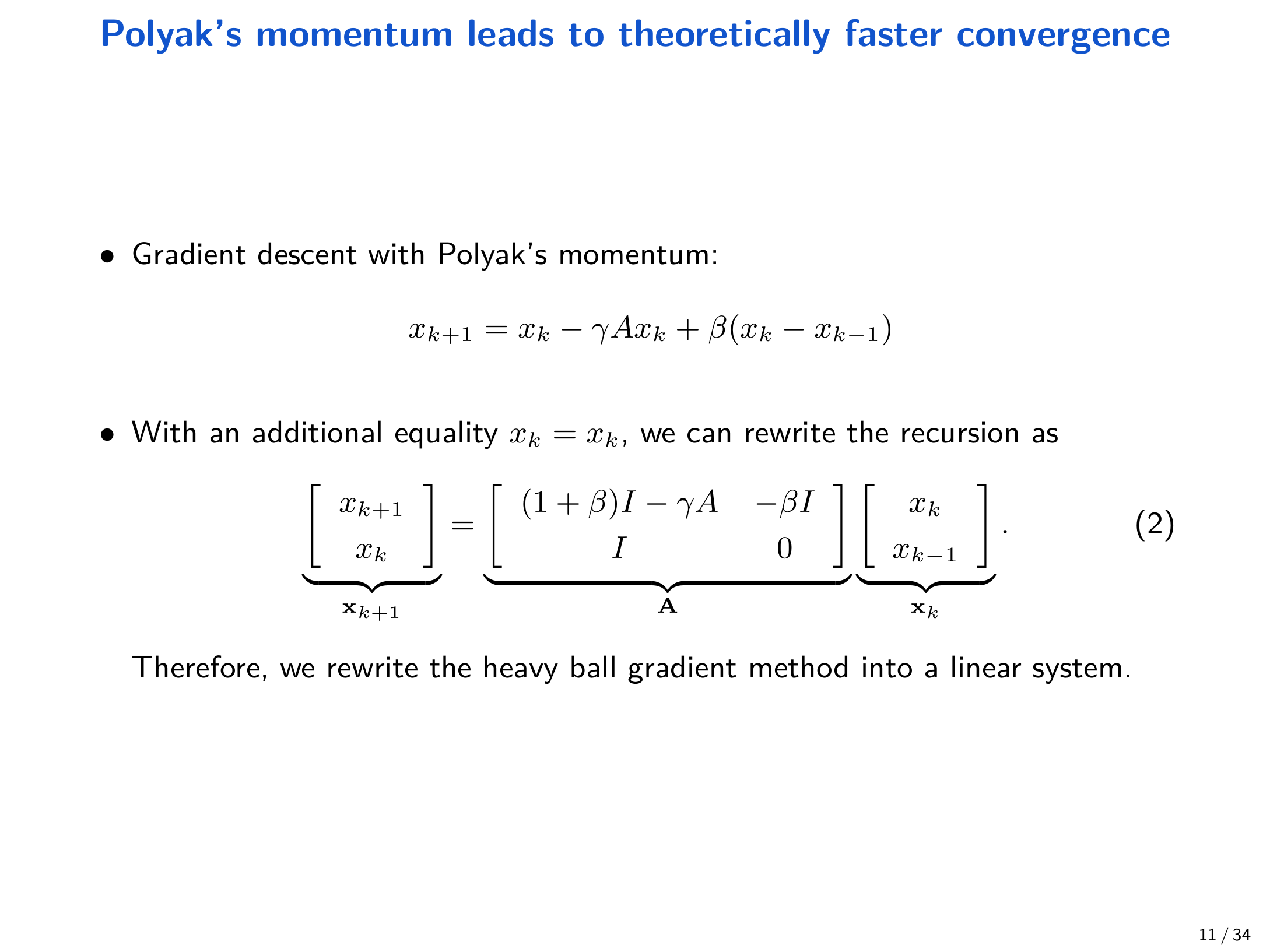
3.2 仅在二次型上可严格证明的加速¶
课件中用二次型目标展示 heavy-ball 的理论加速。设
此时 \(\nabla f(x)=Ax\),heavy-ball 变为线性递推。把状态拼成向量
则存在矩阵 \(M\) 使得 \(s_{k+1}=Ms_k\)。
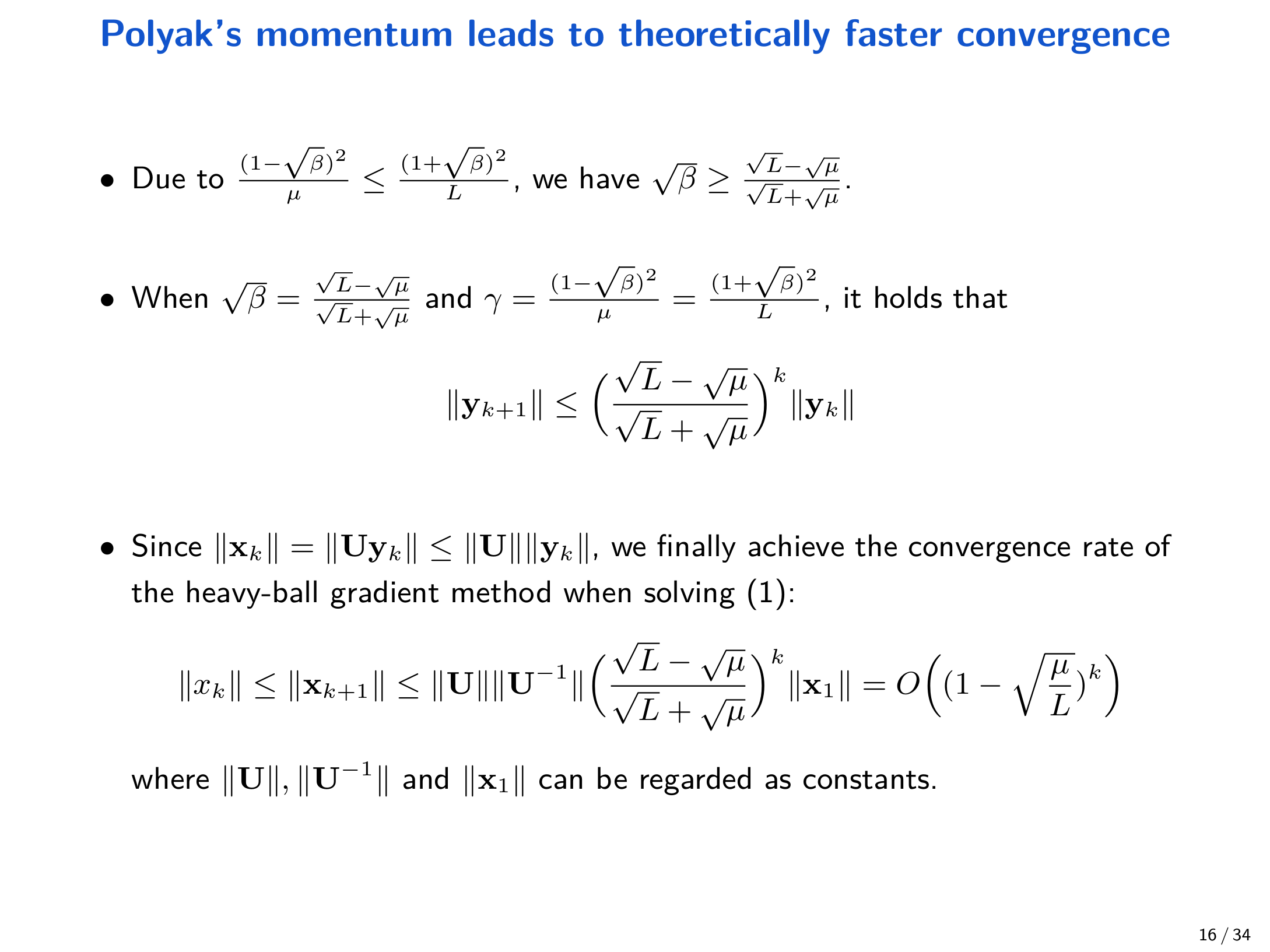
进一步做谱分解,可将分析化为对每个特征方向上的 \(2\times 2\) 递推。对 \(L\)-光滑且 \(\mu\)-强凸的二次型(即 \(A\) 的特征值落在 \([\mu,L]\)),可以选择一组 “最优” 参数使谱半径最小,从而得到比 GD 更快的线性收敛。
结论 3.1(Heavy-ball 在二次型上的最优参数与速率)
对强凸二次型,可取
并得到收敛因子
其中 \(C\) 与初始化及谱分解常数有关。
Heavy-ball 的局限
heavy-ball 的 “理论加速” 证明高度依赖二次型的线性结构;对一般光滑凸函数,heavy-ball 是否能在最坏情形下严格优于 GD 并不清楚(课件中也强调这一点)。
4 Nesterov 加速梯度(NAG)¶
Nesterov 加速梯度是最经典的一阶加速方法,也是后续 lower bound 意义下的 最优 一阶算法原型。
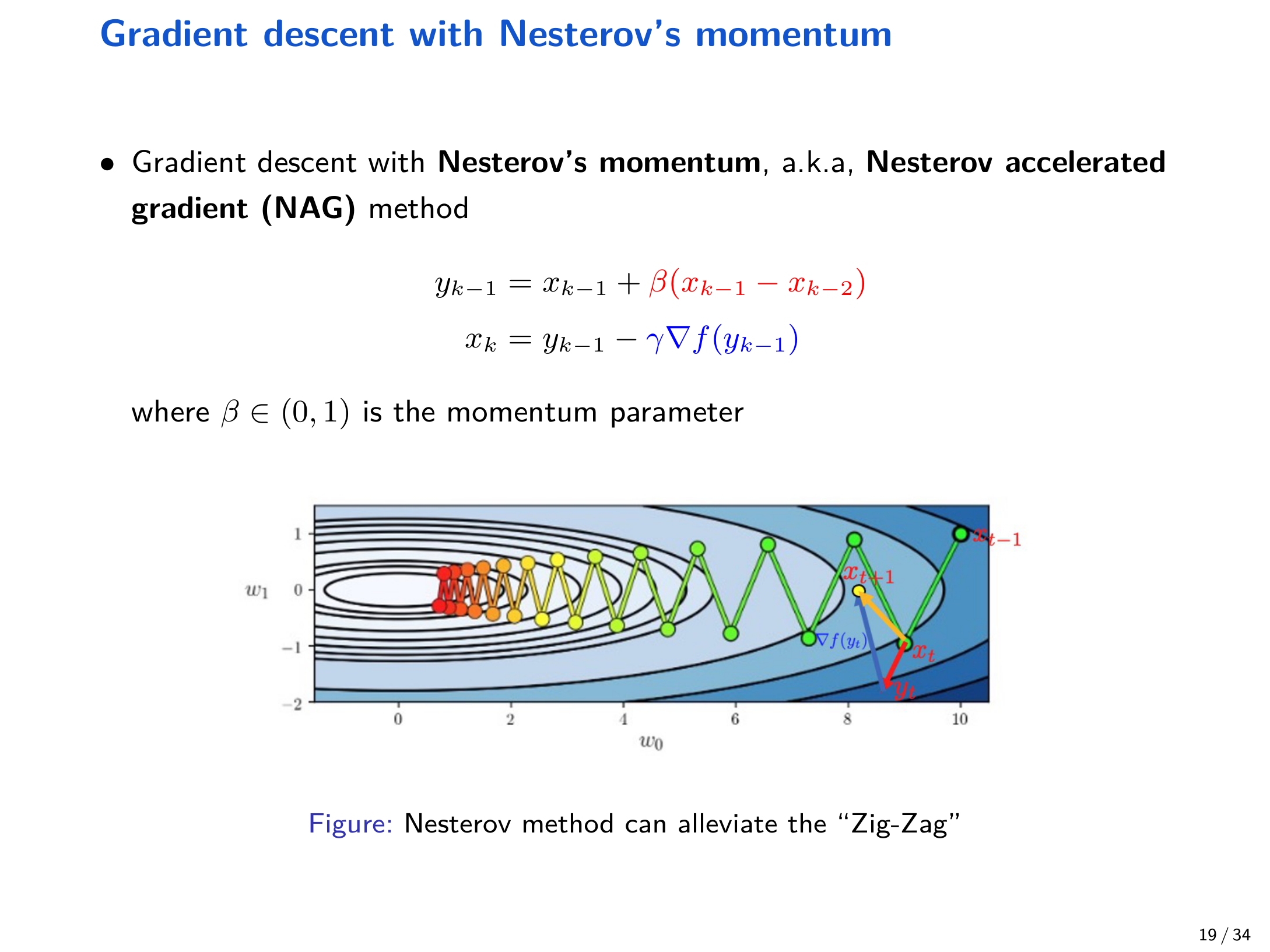
4.1 算法(两序列形式)¶
笔记中的 Nesterov 动量梯度下降写作:
其中 \(\gamma>0\) 为步长,\(\beta_k\in(0,1)\) 为动量系数(可随 \(k\) 变化),并取初始化 \(x_1=x_0\)。

4.2 一般凸情形:\(O(1/k^2)\) 收敛¶
定理 4.1(一般凸 + 光滑:Nesterov 的收敛率)
设 \(f:\mathbb{R}^d\to\mathbb{R}\) 为凸且 \(L\)-光滑。取
则对所有 \(k\ge 1\),
4.2.1 等价三序列形式(用于证明)¶
令
并定义辅助序列 \(v_k\),可以把更新写成等价形式:
这个形式的关键是:\(v_k\) 让我们能够构造一个会 单调下降 的势函数,从而完成伸缩求和。
4.2.2 两个核心不等式¶
令 \(y:=y_{k-1}\),\(x^+:=x_k=y-\frac{1}{L}\nabla f(y)\)。
(1) 由 \(L\)-光滑性(下降引理)得到:
对照到序列即
(2) 由凸性得到:对任意 \(x\in\mathbb{R}^d\)
又由于 \(x^+=y-\frac{1}{L}\nabla f(y)\),等价于 \(\nabla f(y)=L(y-x^+)\),于是
对照到序列即
把两式相加消去 \(\|y_{k-1}-x_k\|^2\),得到对任意 \(x\) 的关键不等式:
4.2.3 选取比较点并构造势函数¶
令比较点为
由凸性,
因此
结合前一节的不等式得到
接下来用三序列形式把右侧改写成 \(v_{k-1},v_k\) 的差。
由 \(y_{k-1}=(1-\theta_k)x_{k-1}+\theta_k v_{k-1}\) 可得
由 \(v_k=x_{k-1}+\frac{1}{\theta_k}(x_k-x_{k-1})\) 可化简得到
代回得
移项并除以 \(L\theta_k^2\),得到单调性(伸缩)结构:
于是势函数
是非增的。由 \(\theta_k=2/(k+1)\) 与初始化 \(v_0=x_0\),可推出
4.3 强凸情形:线性(指数)收敛¶
定理 4.2(强凸 + 光滑:Nesterov 的收敛率)
设 \(f\) 为 \(\mu\)-强凸且 \(L\)-光滑。取
则存在势函数 \(\Phi_k\) 使得
从而得到
4.3.1 等价更新与势函数¶
讲义给出一个与两序列形式等价的更新(用 \(v_k\) 表示):
并取 \(v_0=x_0\)。
定义势函数
讲义通过把 \(L\)-光滑与 \(\mu\)-强凸的两边界不等式按比例组合,构造出一个 “交叉项被抵消” 的收缩关系,最终得到
该结论的意义是:在强凸情形,Nesterov 将 GD 的 \(O((1-\mu/L)^k)\) 改善为 \(O((1-\sqrt{\mu/L})^k)\),从而把迭代复杂度从 \(O(\kappa\log(1/\epsilon))\) 降到 \(O(\sqrt{\kappa}\log(1/\epsilon))\)。
5 Anderson Acceleration¶
Anderson acceleration 可以视为对固定点迭代的多步外推。令
则最优点 \(x^\star\) 满足 \(x^\star=g(x^\star)\)。Anderson 在每一步使用过去 \(m+1\) 个历史状态,解一个带约束的最小二乘来组合它们,从而得到更快的实践表现。

5.1 算法(讲义形式)¶
令 \(m_k:=\min\{m,k\}\),残差 \(r_i:=g(x_i)-x_i\),并令 \(R_k=(r_k,r_{k-1},\ldots,r_{k-m_k})\)。Anderson 的更新为:
命题 5.1(闭式解的等价形式)
若 \(R_k^\top R_k\) 非奇异,则上面的带约束最小二乘有等价闭式表达(讲义给出具体形式),可由 KKT 条件推导得到。
收敛性(讲义备注)
在 \(\mu\)-强凸且 \(L\)-光滑假设下,若进一步假设 \(\|\alpha_k\|_1\) 有界并取 \(\gamma\in(0,1/L]\),Anderson 的渐近收敛阶与 GD 同量级;但在实践中,它常常比 Nesterov 更快,理论与实践之间的差距仍是开放问题。
6 Lower Bound 与最优性¶
一阶方法的经典模型假设算法只能访问梯度信息,并满足
在该模型下,Nesterov 的速率是最优的。
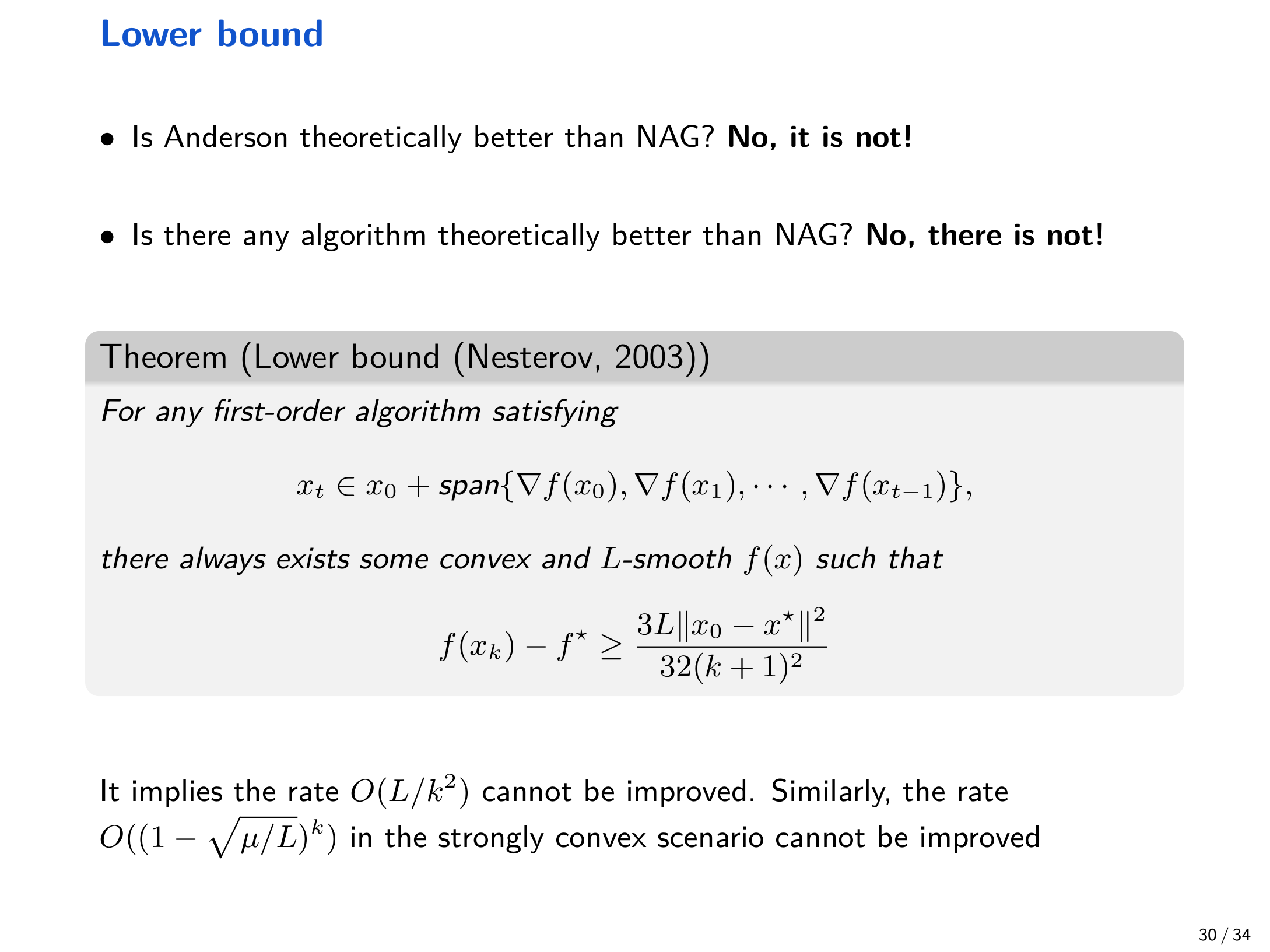
定理 6.1(一般凸:复杂度下界)
对任意满足上述一阶信息模型的算法,总存在某个凸且 \(L\)-光滑的 \(f\),使得
定理 6.2(强凸:复杂度下界)
对任意满足上述一阶信息模型的算法,总存在某个 \(\mu\)-强凸且 \(L\)-光滑的 \(f\),使得

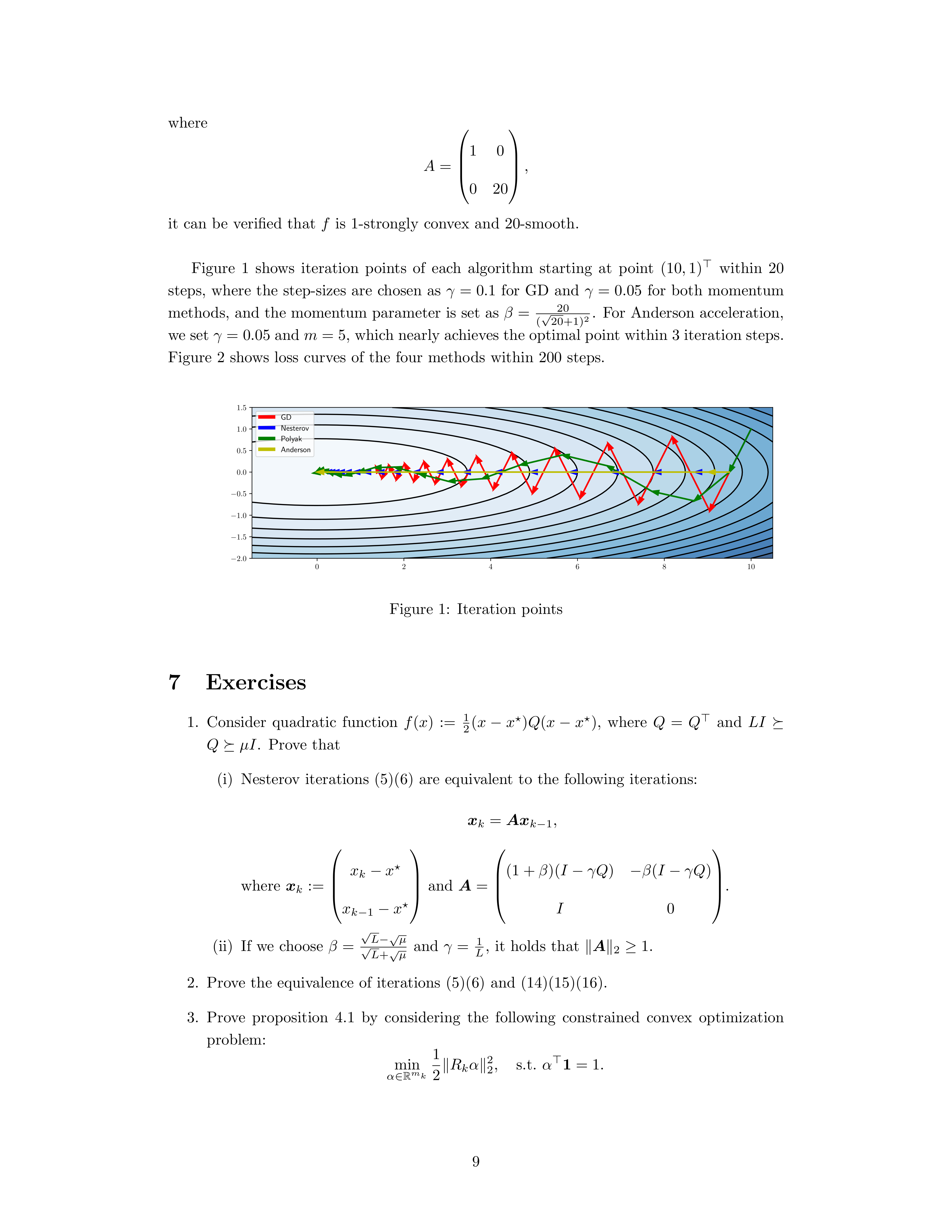
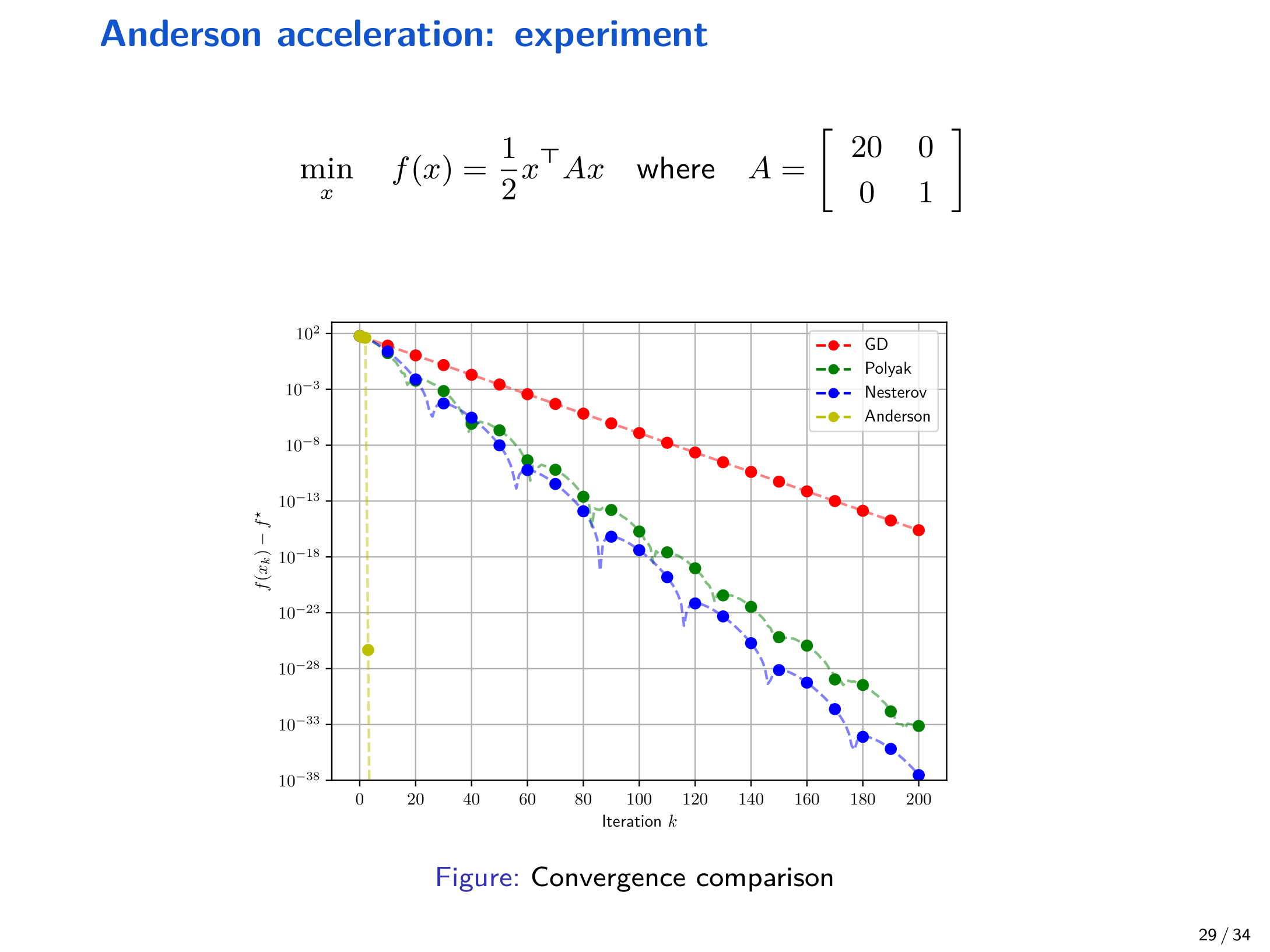
7 数值实验:二次型上的对比¶
讲义用二维二次型展示四类方法的行为差异。定义
则 \(f\) 为 \(1\)-强凸且 \(20\)-光滑。以 \((10,1)\) 为初始点,展示迭代点轨迹与损失下降曲线:
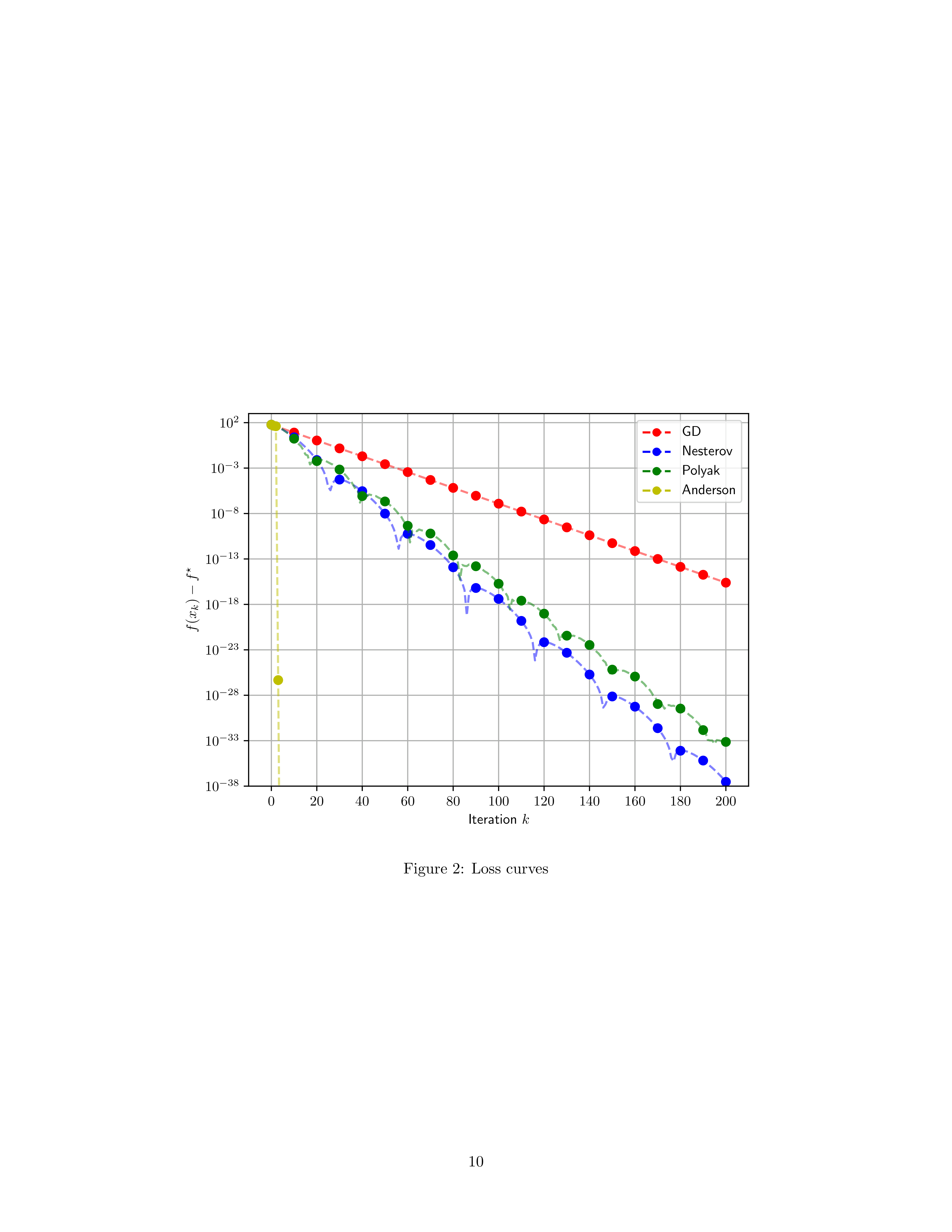
课件也给出了对比图(GD / Polyak / Nesterov / Anderson):
8 练习¶
-
考虑二次型 \(f(x)=\frac{1}{2}(x-x^\star)^\top Q(x-x^\star)\),其中 \(Q=Q^\top\) 且 \(LI\succeq Q\succeq \mu I\)。
- 证明 Nesterov 迭代可写成一个关于 \(\begin{bmatrix}x_k-x^\star\\x_{k-1}-x^\star\end{bmatrix}\) 的线性系统,并写出对应矩阵。
- 当 \(\beta=\frac{\sqrt{L}-\sqrt{\mu}}{\sqrt{L}+\sqrt{\mu}}\) 且 \(\gamma=1/L\) 时,证明谱范数 \(\|A\|_2\ge 1\)(该问题提醒:参数选择与分析需要更精细的势函数,而非直接看线性系统谱半径)。
-
证明两序列形式的 Nesterov 迭代与强凸情形的三序列形式(含 \(v_k\))等价。
-
用 KKT 条件证明 Anderson 的命题 5.1(等价闭式解)。
9 总结¶
- Polyak heavy-ball 与 Nesterov 动量都能在实践中显著缓解 GD 的 zig-zag。
- Heavy-ball 的严格加速结论主要建立在二次型(线性递推)上。
- Nesterov 在一般凸情形达到 \(O(1/k^2)\),在强凸情形达到 \(O((1-\sqrt{\mu/L})^k)\),并且在一阶信息模型下达到最优复杂度下界。
- Anderson acceleration 虽在最坏情形下不优于 Nesterov,但在许多任务中表现非常强,理论解释仍在发展中。